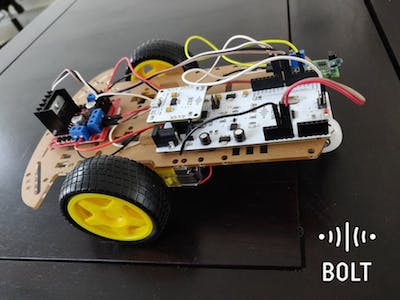
Don't know what to do with your Bolt WiFi Module, a chassis and a few motors? Don't worry, we will show you!

All the components required for the project are mentioned below and are easily available in market at a reasonable price.
1. Bolt Wifi Module
2. Basic Robotic Kit

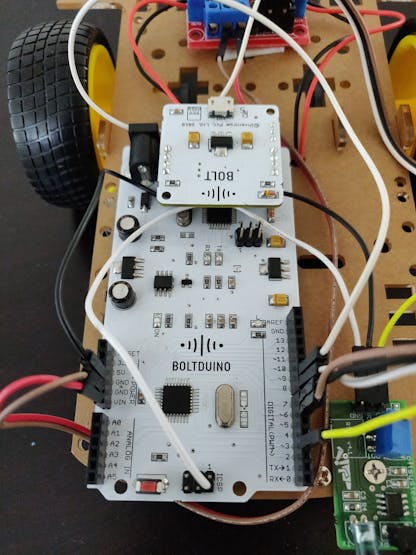
3. Arduino UNO or Boltduino

4. L298N Motor driver shield
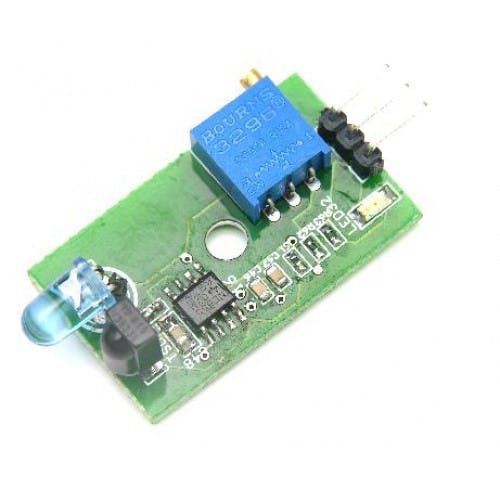
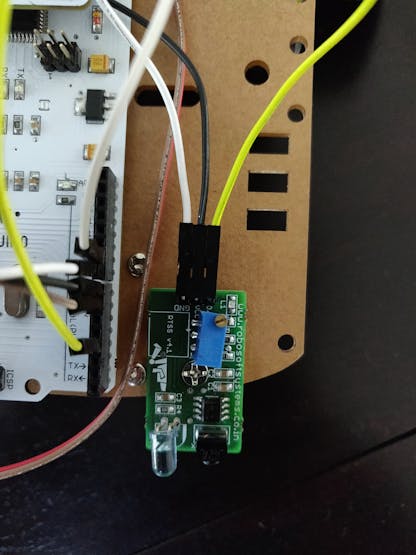
5. Proximity Sensor
6. Jumper Wires

7. Power Adapter

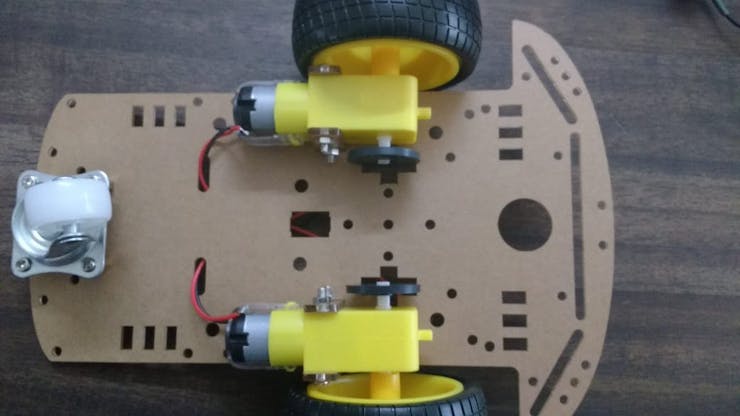
1. Attach the caster wheel in the front middle portion of the chassis as shown
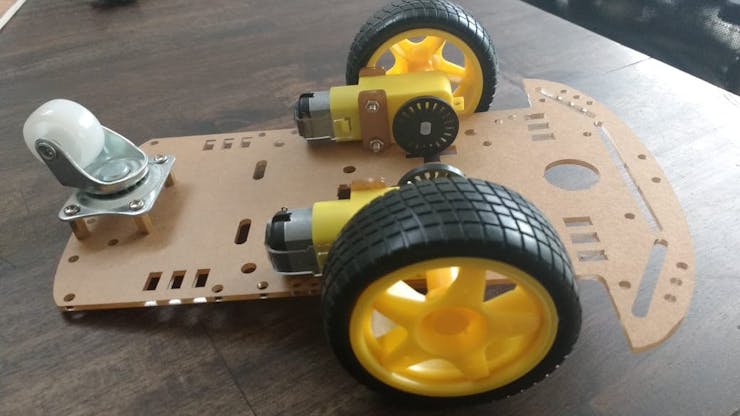
2. Assemble the robotic car chassis and attach the two DC motors using the nuts and bolts along with the wheels provided as shown.
NOTE: Solder the wires to the motor's terminal before attaching it to chassis.
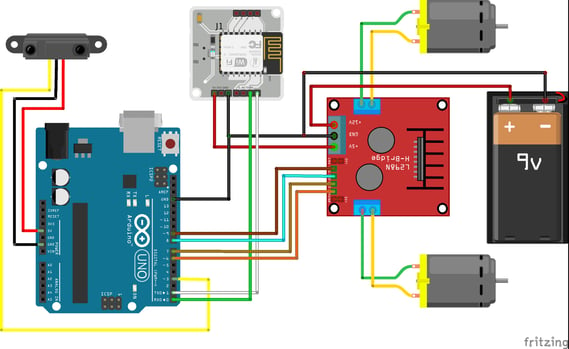
3. Now connect the terminals of the motor to the L298N motor driver module as shown below.
NOTE: Connect both the terminal of the motor on the same side of the driver module.
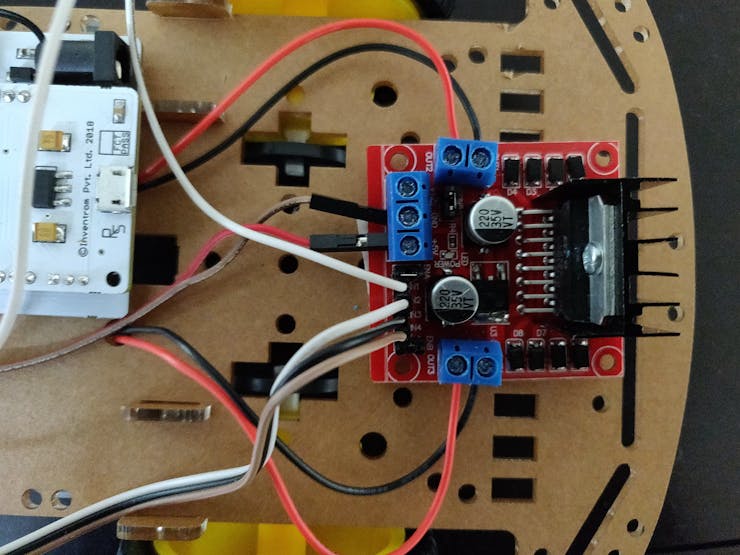
4. Connect the 5V pin and GND pin of the driver module to 5V and GND of Arduino respectively.
5. Connect the pins 5V, GND, Tx and Rx of Bolt to the pins 5V, GND, Rx and Tx of Arduino respectively. For Boltduino, attach the Bolt unit in the slot present.
6. Connect the four input terminals (IN1, IN2, IN3, IN4) to pins 6, 7, 8 and 9 respectively.
7. Connect the 5V, GND and OUT pins of proximity sensor to pins 5V, GND and 3 of Arduino respectively.
NOTE: Check all the connections before powering and for any help look into the schematic.
Bolt IoT Platform
Bolt IoT platform gives you the capability to control your devices and collect data from IoT devices safely and securely no matter where you are. Get actionable insights by deploying machine learning algorithms with just a few clicks to detect anomalies as well as predict sensor values. To know more visit boltiot.com.
Step -2 Connecting Bolt to cloud
After assembling the hardware, register and connect the Bolt unit to the Bolt Cloud. Know more at registering and connecting bolt to cloud.
Step 3: Get the code.
Get the code from the Github repository of this project. Download a.zip file or clone it to your system, whatever suits you.
Step 4: Working with the code.
There are two parts of code:
Step 5: Setting up Arduino.
Once you are done with setting up your hardware and connecting your bolt to the cloud, upload the firmware present in the file Bolt_Robot_Car.ino to your Arduino. To know how to set up Arduino IDE and upload a code to Arduino follow this link.
Step 6: The Controller App.
Double click on the controller.html file and you should be presented with the following web page.
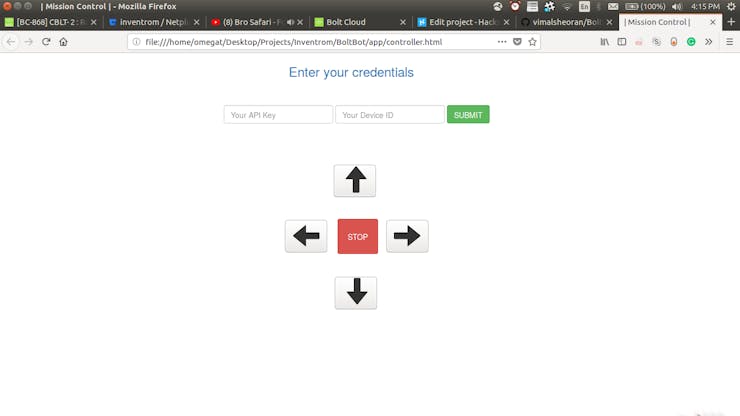
Now enter your API Key and Device ID into their respective fields, and hit SUBMIT. You can get your API Key and Device ID from your Bolt Cloud Dashboard.
After this you can use the control buttons to control the motion of your robot. The button presses trigger specific JavaScript functions (check file controller.js) to send commands to the Bolt Cloud and then to your Bolt WiFi Module. Now you have an RC bot do what you will with it. There can be multiple things done with this, you can attach a few sensors to it or make it automatic or whatever you wish. And if you mess up don't worry, we the natives of the Maker Land are here to help you anytime.
With the Bolt Cloud, you can easily control the robot over the internet from anywhere in the within minutes.
Check out the Bolt IoT and ML training. This online video training is excellent for those who want to start with IoT and ML because it teaches you to build projects from the basics. Click on the button below to know more about the training.
Get the latest IoT tutorials, projects, and updates delivered to your inbox.